|
Yinghua Zhou Welcome! I am currently a CS master's student at Brown University. I am currently interested in Embodied Intelligence, particularly large foundation models for generalist robot learning, such as World (Action) Models. Prior to Brown, I completed my B.S. in Computer Science at Monash University and received my (first class) Honours degree in Computer Science from The University of Sydney. 💡 I am actively looking for research collaborations. Please feel free to drop me an email if interested, or just to say hi! 👋 Contact: zyinghua [at] brown [dot] edu |

|
Research |
|
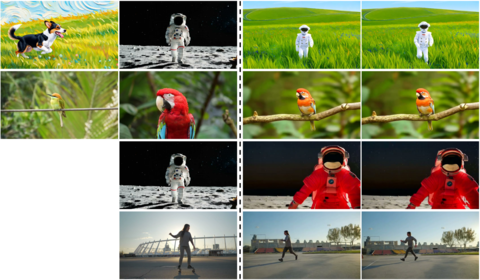
CLoRA: Exploring and Adapting Block-wise Functionalities in Video DiTs for Composable Personalization
Yinghua Zhou, Evan Luo arXiv soon, 2026 paper / code We find that certain transformer blocks in modern video DiTs could dominate content / style / motion, and we apply LoRA to these specific blocks to enable video personalization. |
|
Goal Force: Teaching Video Models To Accomplish Physics-Conditioned Goals
Nate Gillman, Yinghua Zhou, Zitian Tang, Evan Luo, Arjan Chakravarthy, Daksh Aggarwal, Michael Freeman, Charles Herrmann, Chen Sun CVPR, 2026 project page / arXiv / code Goal Force specifies visual goals for video world models via explicit force vectors; trained only on synthetic causal primitives, it generalizes zero-shot to real-world scenes as an implicit neural physics simulator. |
|
Website template adapted from Jon Barron. |